
Avec Yona Robotics, les robots industriels autonomes sont plus intelligents. Ils naviguent désormais dans des environnements inconnus et non structurés. Aucune cartographie ni connaissance préalable n’est requise, ni aucune modification de l’infrastructure dans laquelle va évoluer le robot.
Nouvelle startup de la deeptech, Yona Robotics embarque des technologies issues de 20 ans de travaux au centre Inria de l’Université Grenoble Alpes, maturées dans le cadre de l’IRT Nanoelec au cours des dix dernières années. Accompagnée en maturation et incubation, puis cofondée par la SATT Linksium, elle se développe dans l’écosystème grenoblois.
Son équipe développe un ensemble de logiciels, permettant des performances temps réel sur des cartes de calcul embarqué, pour la robotique mobile : voitures, navette automatique, petit véhicule de micromobilité, robot de transitique industrielle, infrastructure intelligente. En créant la société en juillet dernier, David Gualino veut rendre « intelligent » les robots mobiles pour l’industriel.
« Les véhicules autonomes, ou robots mobiles autonomes, qui se déplacent efficacement dans des environnements complexes et dynamiques, requiert des technologies et des compétences spécifiques qui étaient, jusqu’à présent, difficiles à acquérir, explique David Gualino, créateur de Yona Robotics. « Aujourd’hui, les systèmes les plus avancés de perception et de navigation en environnement dynamique complexe, d’analyse de risque et de prise de décision permettent à la robotique mobile de sortir des hangars et des pistes d’essai balisée ! ».
Créateur de Yona Robotics, David Gualino est ingénieur des Arts & Métiers. Il est titulaire d’un master en robotique avancée de l’Ecole de Mines de Paris. David Gualino a construit un parcours à la croisée de la recherche, de l’industrie et de l’innovation technologique, avec une spécialisation marquée en robotique mobile autonome et la volonté de contribuer à l’Industrie 5.0.
 Yona Robotics propose aux industriels qui conçoivent et commercialisent des robots mobiles, une offre complète (niveau TRL 8) comprenant des logiciels de perception et de navigation en environnement dynamique complexe, d’analyse de risque et de prise de décision.
Yona Robotics propose aux industriels qui conçoivent et commercialisent des robots mobiles, une offre complète (niveau TRL 8) comprenant des logiciels de perception et de navigation en environnement dynamique complexe, d’analyse de risque et de prise de décision.
Avec Yona Robotics, le robot gère et sécurise ses déplacements en temps réel grâce à un modèle dynamique intégrant la séparation entre le sol et les obstacles, l’estimation du profil et de l’élévation du sol. Doté de grilles d’occupation probabiliste dynamique basée sur la fusion des données des capteurs, le modèle génère une trajectoire de couverture et un cheminement évitant les obstacles.
« Grâce notre approche inédite, la navigation est enfin envisageable dans des environnements inconnus et non structurés grâce à une estimation de la configuration du terrain et à une identification des zones praticables. Aucune cartographie ni connaissance préalable de l’environnement n’est requise, ni aucune modification de l’infrastructure dans laquelle va évoluer le robot », indique Houssem Meghnoudj, Directeur technique de Yona Robotics.
Plus particulièrement chargé du développement et de l’industrialisation de l’offre produit, Houssem Meghnoudj est docteur en automatique et en intelligence artificielle, major de promotion avec mention excellente à l’École Nationale Polytechnique d’Alger et, passionné de robotique, il a remporté le titre de vice-champion du monde de la compétition de robotique Eurobot en 2018.
« En terme de certificabilité, notre plateforme logicielle est fondée sur le croisement de modèles mathématiques et de règles créés par des humains plutôt que par des machines », poursuit Houssem Meghnoudj. « Cela permet l’accès aux preuves formelles et aux explications des mécanismes de perception et de navigation utilisés sur chaque mission, ainsi le système de navigation, bien que doté d’intelligence artificielle n’est plus un « trou noir » dont on ne peut pas retrouver les données. »
La robustesse de l’offre Yona Robotics repose sur la mise en œuvre de méthodes probabilistes tenant compte des incertitudes liées aux capteurs et à l’environnement, la fusion des données provenant de différentes technologies de capteurs (lidar, radar, ultrasons, caméra). Elle offre une bonne tolérance aux pannes en cas de perte d’un capteur.
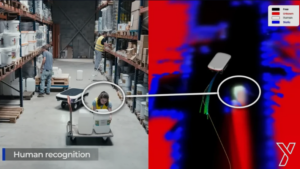 « Le modèle est performant et réactif car il intègre une collaboration très étroite, continue et en temps réel, entre la perception et la navigation », précise encore Houssem Meghnoudj. Ainsi, à conditions matérielles égales, il est possible d’atteindre des vitesses de navigation plus élevées, d’optimiser la prévention des obstacles lors du fonctionnement dans un environnement dynamique. Le robot peut aussi reconnaitre des objets (via des modules sémantiques) et leur appliquer un traitement spécifique ou ajuster son comportement pendant le mouvement.
« Le modèle est performant et réactif car il intègre une collaboration très étroite, continue et en temps réel, entre la perception et la navigation », précise encore Houssem Meghnoudj. Ainsi, à conditions matérielles égales, il est possible d’atteindre des vitesses de navigation plus élevées, d’optimiser la prévention des obstacles lors du fonctionnement dans un environnement dynamique. Le robot peut aussi reconnaitre des objets (via des modules sémantiques) et leur appliquer un traitement spécifique ou ajuster son comportement pendant le mouvement.
« La robotique mobile va enfin être accessibles dans de nombreux domaines car nous allons donner à nos clients les moyens d’exploiter les technologies d’intelligence artificielle pour leurs applications de robots mobiles autonomes tant pour la manutention, la logistique, les engins agricoles, que pour les robots d’inspection, de service, les drones et tout véhicule autonome », ajoute Maurice Pitel, directeur commercial et marketing de Yona Robotics.
Architecte de systèmes numériques, il revendique 35 ans d’expérience en conduite de projets dans différents contextes d’innovation doublée d’une forte expertise dans le développement d’applications critiques et certifiées.
« Nos logiciels de perception et de prise de décision sont destinés à être embarqués dans des robots mobiles, pour leur permettra de naviguer de manière sûre et autonome dans des environnements intérieurs et extérieurs complexes », poursuit Maurice Pitel. « Pour les AGV (Automated Guided Vehicles) comme pour les AMR (Autonomous Mobile Robots), nous disposons d’une plateforme d’intelligence artificielle qui combine robustesse, sûreté de fonctionnement et performance. »
Les solutions de Yona Robotics sont composées d’une plateforme matérielle et logicielle standard destinée à être installée dans les robots mobiles afin de leur apporter les capacités de perception et de navigation souhaitées, utilisant des capteurs choisis spécifiquement pour le type d’application.
« Nos logiciels embarqués de perception et de prise de décision probabiliste basée sur l’IA, permettent la navigation autonome dans des environnements complexes, dynamiques, incertains y compris en présence d’êtres humains dans l’environnement du robot », résume David Gualino. « Les avantages de notre approche sont la certificabilité des logiciels basés sur des modèles créés par l’Homme, les trajectoires d’évitement d’obstacles optimisées dans un environnement dynamique voire inconnu, la reconnaissance d’objets, la robustesse permise par l’approche probabiliste et enfin le coût réduit d’intégration et l’accompagnement à l’intégration. Nos solutions s’appliquent aussi aux systèmes d’assistance à la conduite automobile. »